智能导航技术如何扫清扫地机器人普及最后一道障碍?
近几年扫地机器人异常火热,销量屡创新高,逐渐成为中国家庭中常见生活家电。扫地机器人从诞生那天算起,已有近20年的历史,可长期处于叫好不叫座的状态,直至智能导航技术应用才扫除了扫地机器人普及最后一道障碍。
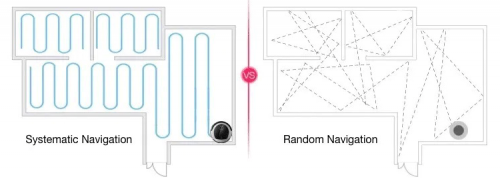
惯性导航的不足
扫地机器人是一个高度集成的家用电器,由传感器、行动装置、电池、风机、集尘盒多个零部件组成,能够自动完成清洁、充电等工作。不过初期扫地机器人导航系统非常简单,采用的是内置陀螺仪、加速计、计数器组成的惯性导航系统。限于成本问题,机器人内部各种传感器精度不高,而且容易受到环境因素干扰,结果扫地机器人行走时间越久误差越高,遇到障碍物拐弯时方向容易偏移,结果扫地机器人工作时像一只无头苍蝇,到处乱跑,经常出现重复清洁或是遗漏清洁问题。
视觉导航革新
由于惯性导航种种不足,扫地机器人制造商开始寻求在机器人表面安装传感器,提升导航精度,目前主要分为激光导航与视觉导航两个流派。iRobot作为扫地机器人创始人,很早就尝试就尝试这一技术方向,在2015年推出了首款视觉导航技术的Roomba 980,它结合了iAdapt 2.0智能导航技术与vSLAM技术,大幅度提升导航效果。其后在Roomba i7+中,iAdapt智能导航技术升级到3.0版。

在Roomba i7+顶部集成了一个摄像头,它藏在一个下陷的窗口当中,保证机器人在穿越沙发、床等低矮家具时不会刮花镜头。与其它视觉导航技术扫地机器人不同的是,摄像头不是面向地面,而是倾斜向上,用来拍摄家居环境的,每秒能够捕捉超过23万个数据点。

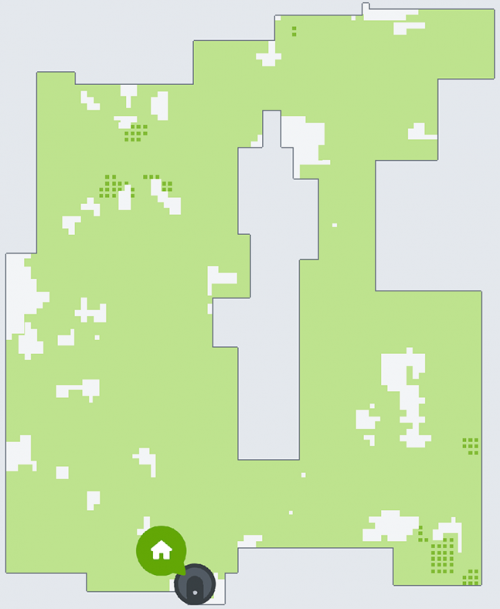
通过这些数据,Roomba i7+能够识别周边物体,比如桌子、沙发、睡床,然后选择几个特定物体作为参考物,在行走时测量自己与参考物的方位、距离变化,判断出自己所在,原理与星光导航有几分相似。而且定位数据与机器人内部的惯性导航系统、vSLAM技术结合后,能大幅度提升导航精度,因此在Roomba i7+完成初次清洁,即可建立一张精确、自动划分好区域的清洁地图,而且随着清扫次数的积累,机器人会更加了解家庭环境布置,不断改善清扫效率。

相比激光导航,视觉导航技术上更为复杂,激光导航技术核心是激光发射器与传感器,只能测量一个水平上的距离数据,技术简单、容易实现,但缺点显而易见——无法识别空间的特征数据,对空间识别能力差于视觉导航,而且激光发射器工作范围有限,一旦空间变大其精度会迅速下降,此外突出机身的激光模块会增加扫地机器人的厚度,影响机器人深入家具底部的能力。而视觉导航是通过摄像头捕捉到三维立体空间,数据量大,需要高性能处理器从海量数据中分析出家具、墙壁等有用的信息,但胜在具备强劲的空间识别能力,不仅能用于室内,也能用于室外,更适应未来智能家居发展需求。

同时为了弥补顶部摄像头没有下视角度,更好清洁地面,Roomba i7+还搭载了Dirt Detect污垢探测技术,通过声学+光学混合识别,检测出地面上的严重污垢,让机器人加强清洁,并把检测到严重污垢区域反馈到清洁地图上,让用户清楚掌握地面状况。
总结
智能导航技术的出现,成功扭转了消费者对扫地机器人乱跑的印象,扫清了它普及最后一道障碍。iRobot Roomba系列扫地机器人搭载了iAdapt 2.0智能导航技术、Dirt Detect污垢探测多项技术,更是将将精准导航与高效清洁整合在一起,大大提升了实用性。
免责声明: 家电资讯网站对文中陈述、观点判断保持中立,不对所包含内容的准确性、可靠性或完整性提供任何明示或暗示的保证。请读者仅作参考,并请自行承担全部责任。
本网站有部分内容均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,本网站无法鉴别所上传图片或文字的知识版权,本站所转载图片、文字不涉及任何商业性质,如果侵犯,请及时通知我们,本网站将在第一时间及时删除,不承担任何侵权责任。联系方式:sikto@126.com
本网认为,一切网民在进入家电资讯网站主页及各层页面时已经仔细看过本条款并完全同意。敬请谅解。
- 重点推荐
-
 京东618下单用户数再创新高 京东家装品牌成交额同比增长140%
京东618下单用户数再创新高 京东家装品牌成交额同比增长140%
 安吉尔哪吒7天保鲜茶吧机3788重磅上市!鲜、矿双水质,健康饮养新选择
安吉尔哪吒7天保鲜茶吧机3788重磅上市!鲜、矿双水质,健康饮养新选择
 携手华为!海尔智慧家庭朋友圈再扩大
携手华为!海尔智慧家庭朋友圈再扩大
 海尔智慧家庭亮相HDC2026,携手华为共建智慧家
海尔智慧家庭亮相HDC2026,携手华为共建智慧家
 智慧“好房子”济南开展,海尔智慧家庭五大沉浸式场景所见即所得
智慧“好房子”济南开展,海尔智慧家庭五大沉浸式场景所见即所得
 海尔智慧家庭在济南落地智慧“好房子”
海尔智慧家庭在济南落地智慧“好房子”
